Sliding Puzzle Solver
2026 Build18 Hackathon · January 12-18 · Team of 5
Outstanding Project Award (Selected from 100+ teams, awarded JBL Go 4 speaker to each member)
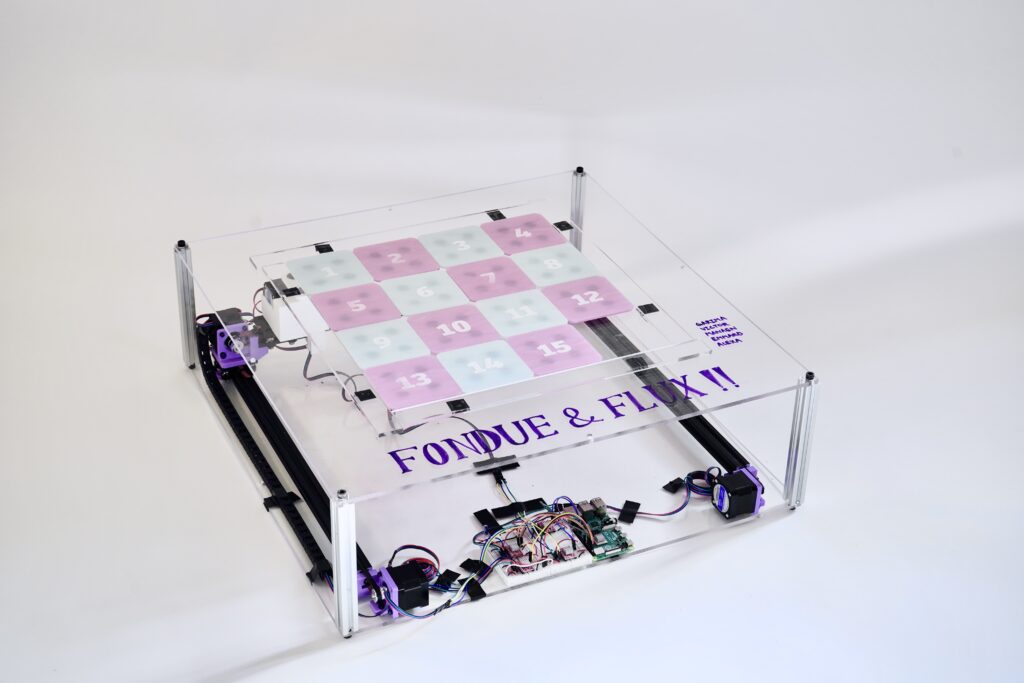
A robotic gantry system that physically solves a 4×4 sliding puzzle
Overview
This project is a 4×4 sliding puzzle solver built during the Build18 Hackathon. We designed and built a gantry-style robotic system that can take in any scrambled puzzle state and physically solve it by moving tiles one by one. You give the system the initial puzzle configuration, and it figures out the solution and executes it in the real world.
The Idea
Sliding puzzles are simple to understand but surprisingly tricky to solve optimally. We wanted to take this classic logic problem and push it into the physical world.
Instead of solving the puzzle digitally on a screen, we built an XYZ gantry system that:
Computes a valid solution path
Translates that solution into motor commands
Physically moves puzzle tiles into place
Hardware Setup
Motors: NEMA 17 stepper motors
Drivers: A4988 stepper motor drivers
Compute: Raspberry Pi 4
Mechanics: Custom XY gantry system for tile manipulation
The gantry allows controlled movement across the puzzle board, letting the system pick up, shift, and place tiles accurately.
Software & Control
The system is controlled in Python, split between the Raspberry Pi and a laptop:
Puzzle-solving logic generates a sequence of tile moves
Motion control code converts puzzle moves into gantry movements
Laptop interface is used for sending commands and logging outputs
Challenges
Precision issues with stepper motors
Alignment and calibration problems
Translating abstract puzzle logic into physical motion
Time pressure at Build18
