Screened candidate materials (PVA, Soluvlies, cotton candy, gelatin) for dissolution and mechanical behavior.
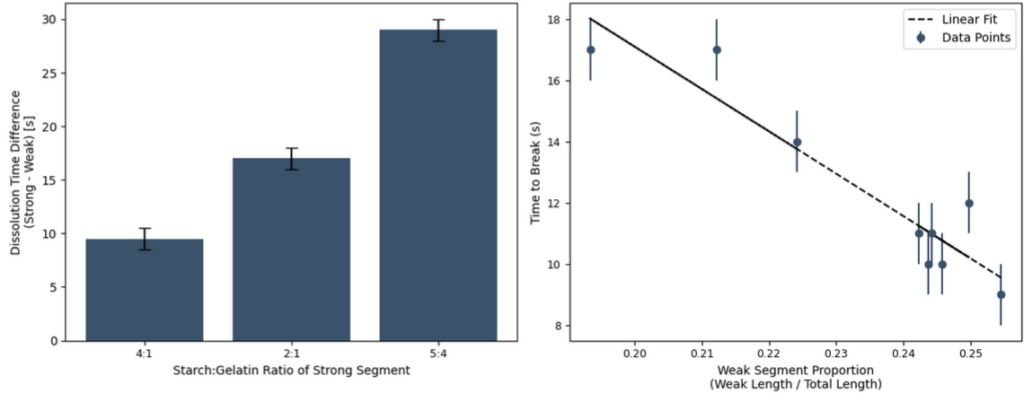
Developed multiple gelatin-based formulations using cornstarch, glycerol, and TGase for tunability.
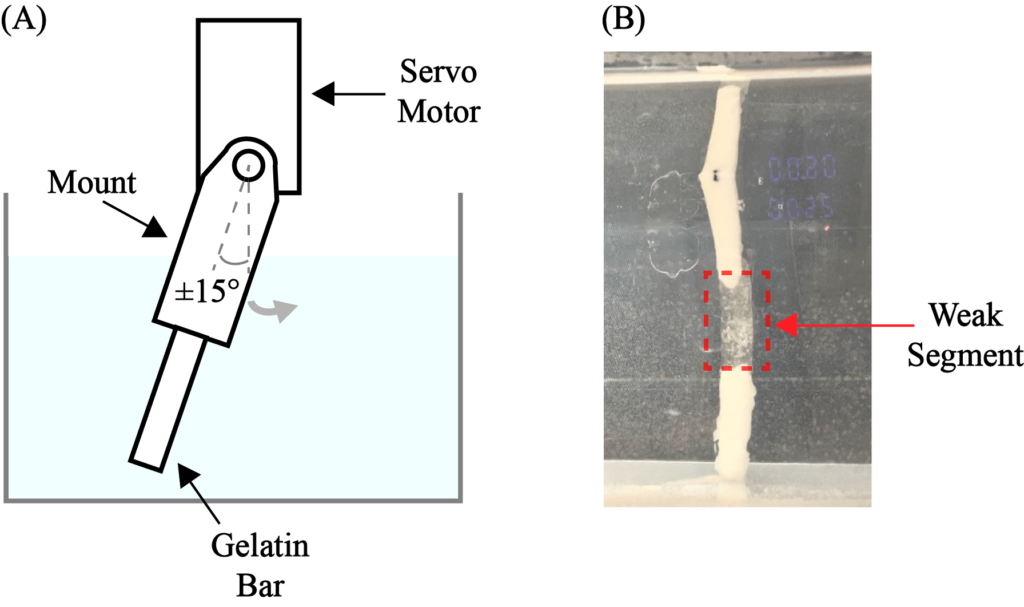
Designed and fabricated bars with embedded weak segments using 3D-printed molds.
Built a servo-driven mechanical test rig to evaluate cyclic stress + dissolution.
Measured failure location, water resistance, stretchability, and breakdown dynamics.
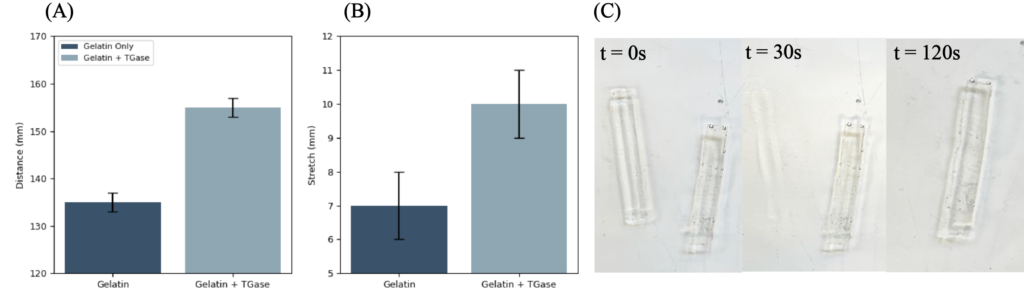
Compared crosslinked vs non-crosslinked gelatin for mechanical strength and water durability.
Documented findings in a full technical report and delivered midterm + final presentations.