Under the ERIP Summer Research Scholarship, I worked as an individual researcher on GOAT (Good Over All Terrains), a bio-inspired shape-changing robot that switches between driving and rolling modes. My work focused on building multi-scale prototypes, integrating electronics, and testing how material stiffness affects morphing performance.
Research Focus
How do scaling and material stiffness influence the morphing performance and load capacity of a shape-changing field robot?
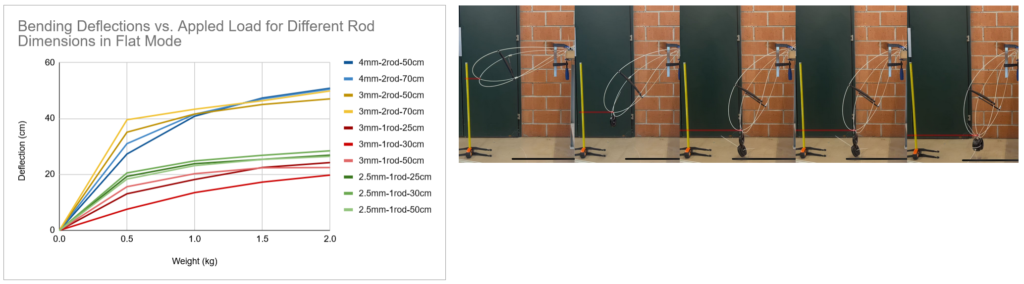
Bending Deflection Test
Contributions
Built mini and mega GOAT prototypes
Integrated electronics and control (ESP32, DRV8833, Bluetooth)
Designed and 3D-printed parts for motors, winches, and cable routing
Conducted stiffness and bending tests on fiberglass frames